Par GPS
„NAVSTAR GPS ” (angļu val. Navigation Satellite Time and Ranging, Global Positioning System — Attāluma un laika
![]() mērīšanas sistēma, izmantojot navigācijas pavadoņus. Globālā pozicionēšanas sistēma) — pavadoņu navigācijas sistēma, bieži saukta GPS. Sistēma nosaka objektu atrašanās vietu un pārvietošanās ātrumu jebkurā vietā uz Zemes (arī polu tuvumā) gandrīz jebkādos laika apstākļos, kā arī kosmiskajā telpā līdz 100 tūkstošiem kilometru attālumā no Zemes virsmas. Sistēmu ir izstrādājusi, realizējusi un ekspluatē ASV Aizsardzības ministrija.
mērīšanas sistēma, izmantojot navigācijas pavadoņus. Globālā pozicionēšanas sistēma) — pavadoņu navigācijas sistēma, bieži saukta GPS. Sistēma nosaka objektu atrašanās vietu un pārvietošanās ātrumu jebkurā vietā uz Zemes (arī polu tuvumā) gandrīz jebkādos laika apstākļos, kā arī kosmiskajā telpā līdz 100 tūkstošiem kilometru attālumā no Zemes virsmas. Sistēmu ir izstrādājusi, realizējusi un ekspluatē ASV Aizsardzības ministrija.
Vēsture

Ideja par pavadoņu radionavigācijas sistēmu radās 50-tajos gados, kad PSRS tika palaists pirmais
mākslīgais Zemes pavadonis. Amerikāņu zinātnieki Ričarda Keršnera vadībā vēroja pirmā pavadoņa raidītos signālus un konstatēja, ka, pateicoties Doplera e fektam, saņemtā signāla frekvence palielinās, pavadonim pietuvojoties, un samazinās, pavadonim attālinoties. Viņi atklāja, ka, precīzi zinot savas koordinātes uz Zemes, ir iespējams noteikt pavadoņa atrašanās vietu, un otrādi - zinot pavadoņa atrašanās vietu, var noteikt savas koordinātes.
Ideju realizēja tikai pēc 20 gadiem. Pirmo eksperimentālo pavadoni orbītā palaida 1974. gada 14. jūlijā, bet 1978. gada 22. februārī tika palaists pirmais orbitālās grupas pavadonis. No 1978. līdz 1980. gadam orbitālajā grupā tika palaisti jau 6 pavadoņi, bet 1980. gada 6. janvārī daļēji sāka izmantot GPS. Pēdējais no visiem 24 pavadoņiem, kas nepieciešami, lai pilnībā nosegtu Zemes virsmu, orbītā tika palaists 199 3. gada beigās. Navigācijas sistēmu pilnībā pabeidza 1994. gada 17. janvārī.
Sākumā pie GPS strādāja tikai kā pie militāra projekta. Pēc 1983. gada ASV prezidents atļāva šo sistēmu daļēji izmantot civilām vajadzībām, bet sistēmas precizitāte ar nodomu tika samazināta ar speciāli radītu algoritmu. Tā kā kļuva zināms, ka daži uzņēmumi šo algoritmu atšifrējuši un kļūdas veiksmīgi novērsuši, 2000. gadā ASV prezidents šos speciāli radītos precizitātes traucējumus atcēla.
Hronoloģija
1973 Lēmums par pavadoņu navigācijas sistēmas izstrādi
1974-1979 Sistēmas izmēģināšana
1977 Signāla saņemšana no virszemes stacijas, kura simulēja sistēmas pavadoni
1978-1985 Vienpadsmit pirmās grupas pavadoņu palaišana (Block I)
1979 Programmas finansējuma samazināšana. Lēmums par 18 pavadoņu palaišanu 24 vietā
1980 Tādu pavadoņu palaišana, kas aprīkoti ar sensoriem, kuri reģistrē atomieroču izmēģinājumus zem ūdens un virs zemes
1980-1982 Programmas finansējuma turpmāka samazināšana
1983 Pēc uzņēmuma “Korean Airlines” lidaparāta bojāejas, kas tika notriekts virs PSRS teritorijas, tika pieņemts lēmums par signāla pārraidīšanu civildienestiem
1986 Kosmiskā kuģa “Space Shuttle «Challenger»” bojāeja programmas izpildi apturēja, jo ar šī kuģa palīdzību bija plānots orbītā palaist otrās grupas pavadoņus. Rezultātā par galveno transporta līdzekli tika izvēlēts raķešu nesējs „Delta”
1988 Lēmums par orbitālās pavadoņu grupas palielināšanu līdz 24 pavadoņiem. 18 pavadoņi nespēj nodrošināt vienmērīgu sistēmas darbību
1989 Otrās grupas pavadoņu aktivizēšana
1990-1991 SA (angļu val. selective availability — neautorizētiem lietotājiem mākslīgi veidota atrašanās vietas noapaļošana līdz 100 metriem) atslēgšana uz laiku saistībā ar karu Persijas līcī un uztvērēju militāro modeļu trūkumu. SA ieslēgšana 1991. gada 1. jūnijā
08.12.1993 Paziņojums par sistēmas sākotnējo gatavību (angļu val. Initial Operational Capability). Šajā pašā gadā tika pieņemts galīgais lēmums par signālu bezmaksas pārraidīšanu civildienestiem un privātpersonām
1994 Pavadoņu grupa tiek nokomplektēta
17.07.1995 Sistēmas pilnīga gatavība (angļu val. Full Operational Capability)
01.05.2000 SA atslēgšana civilajiem lietotājiem. Tādējādi mērījumu precizitāte palielinājās no 100 līdz 20 metriem
26.06.2004 Savstarpēja pieteikuma parakstīšana par „Galileo” un GPS savietojamību un savstarpēju papildināšanu
2006 Krievijas un Amerikas sarunas par sadarbību, lai nodrošinātu kosmisko navigācijas sistēmu „ГЛОНАСС” un GPS² savstarpējo papildināšanu
Kosmiskais segments
 Sistēmas pamatā ir navigācijas pavadoņi, kas 20180 km augstumā riņķo ap Zemi sešās orbitālajās trajektorijās (4 pavadoņi katrā). Pavadoņi pēta signālus diapazonos: L1=1575,42 MHz L2=1227,60 MHz, pēdējā modeļa pavadoņi arī diapazonā L5=1176,45 MHz. Antena uztver navigācijas informāciju (parasti apstākļos, kad pavadonis ir tieši redzams) un GPS uztvērējs to apstrādā. (Standarta precizitātes) informācija S/A kodā, ko pārraida ar L1 palīdzību, tiek izplatīta brīvi, bez maksas un neierobežojot lietotājus. Šifrēts P(Y) kods (ar daudz augstāku precizitāti) tiek izmantots militārām vajadzībām. 24 pavadoņi nodrošina sistēmas 100% darbību jebkurā zemeslodes vietā, tomēr tie ne vienmēr precīzi uztver un aprēķina pozīciju. Tādēļ, lai palielinātu precizitāti un nodrošinātu rezervi kļūmes gadījumiem, orbītā esošo pavadoņu skaits ir liels (apm. 29 2006. gadā). Maksimāli iespējamais vienlaicīgi strādājošo pavadoņu skaits „NAVSTAR” sistēmā ir 31.
Sistēmas pamatā ir navigācijas pavadoņi, kas 20180 km augstumā riņķo ap Zemi sešās orbitālajās trajektorijās (4 pavadoņi katrā). Pavadoņi pēta signālus diapazonos: L1=1575,42 MHz L2=1227,60 MHz, pēdējā modeļa pavadoņi arī diapazonā L5=1176,45 MHz. Antena uztver navigācijas informāciju (parasti apstākļos, kad pavadonis ir tieši redzams) un GPS uztvērējs to apstrādā. (Standarta precizitātes) informācija S/A kodā, ko pārraida ar L1 palīdzību, tiek izplatīta brīvi, bez maksas un neierobežojot lietotājus. Šifrēts P(Y) kods (ar daudz augstāku precizitāti) tiek izmantots militārām vajadzībām. 24 pavadoņi nodrošina sistēmas 100% darbību jebkurā zemeslodes vietā, tomēr tie ne vienmēr precīzi uztver un aprēķina pozīciju. Tādēļ, lai palielinātu precizitāti un nodrošinātu rezervi kļūmes gadījumiem, orbītā esošo pavadoņu skaits ir liels (apm. 29 2006. gadā). Maksimāli iespējamais vienlaicīgi strādājošo pavadoņu skaits „NAVSTAR” sistēmā ir 31.
Kontroles segments (virszemes stacijas)
Orbītā esošo pavadoņu grupu ar 10 novērošanas staciju palīdzību novēro galvenajā kontroles stacijā, kas atrodas VVS aviācijas bāzē „Schriever” Kolorado štatā, ASV. Trīs no šīm stacijām spēj nosūtīt pavadoņiem koriģējošus datus radiosignālu veidā ar 2000 - 4000 MHz frekvenci. Pēdējās paaudzes pavadoņi nosūta saņemtos datus citiem pavadoņiem.
GPS uztvērējs
GPS uztvērējs ir iekārta, kas uztver radiosignālus, lai noteiktu uztvērēja antenas atrašanās vietas ģeogrāfiskās koordinātes, pamatojoties uz datiem par „NAVSTAR” grupas pavadoņu raidīto radiosignālu pienākšanas pagaidu kavējumiem. Mērījumu maksimālā precizitāte ir 3 - 5 metri, bet, ja virszemes stacija raida koriģējošo signālu, - tad līdz 1mm (parasti 5 – 10 mm) pie 1 km attāluma starp stacijām (diferenciālā metode). Komerciālo GPS navigatoru precizitāte ir no 150 metriem (vecajiem modeļiem pie sliktas pavadoņu redzamības) līdz 3 metriem (jaunajiem modeļiem atklātā vietā). Bez tam, izmantojot WAAS sistēmu, precizitāti iespējams paaugstināt līdz 1 - 2 metriem pa horizontāli.
Ir izstrādāti arī GPS monobloki, kuriem ir savs procesors, lai veiktu nepieciešamos aprēķinus, kā arī displejs informācijas atspoguļošanai, un GPS palīgierīces kabatas datoriem un piezīmju datoriem. GPS palīgierīces žargonā tiek sauktas arī par GPS pelēm, jo tās vizuāli atgādina datoru peles.
![]() Līdztekus platuma un garuma noteikšanai, GPS uztvērējs var noteikt:
Līdztekus platuma un garuma noteikšanai, GPS uztvērējs var noteikt:
- precīzu laiku (dažiem uztvērējiem ir PPS izeja);
- debess puses (modeļos bez iebūvēta kompasa — tikai ātruma virzienu kustībā);
- augstumu virs jūras līmeņa (pie nosacījuma, ka signāls tiek saņemts vairāk nekā no četriem pavadoņiem, vai arī, ja uztvērējā ir iebūvēts augstuma mērītājs);
- virzienu uz punktu ar tādām koordinātēm, kuras iedevis lietotājs;
- veikto attālumu, vidējo ātrumu;
- atrašanās vietu apvidus elektroniskajā kartē (daži modeļi).
Informāciju par pārvietošanās ceļu (treku) ir iespējams saglabāt datnē, bet pēc tam nosūtīt (arī pa internetu) citiem GPS lietotājiem, kas vēlas doties pa to pašu maršrutu.
Izmantojot GPS palīgierīci un navigācijas programmu, informācija tiek pārvietota uz kabatas datoru, mobilo tālruni vai datoru, kam pieslēgta šī palīgierīce. Parasti fiziskais pieslēgums tiek veikts, izmantojot virknes portu (RS-232, USB, „Bluetooth”). Lai savienotu GPS uztvērēju ar datoru, var izmantot uztvērēja ražotāja bināro protokolu („Garmin”, „Magellan” un citus) un absolūtajam vairākumam GPS uztvērēju informācijas apmaiņu uztur teksta protokols NMEA .
DOP (GPS)
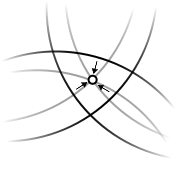
DOP, GDOP, precizitātes samazināšanās vai precizitātes ģeometriskā samazināšanās (angļu val. Dilution of precision, DOP, angļu val. Geometric Dilution of Precision, GDOP) — termins, kuru izmanto globālās pozicionēšanas sistēmas jomā, lai aprakstītu pavadoņu ģeometriskā savstarpējā izvietojuma spēku attiecībā vienam pret otru. Ja pavadoņi redzamības laukā atrodas pārāk tuvu viens otram, runā par „vāju” ģeometrisko izvietojumu (augsta DOP vērtība) un otrādi – ja attālums ir pietiekami liels, ģeometriju sauc par „spēcīgu” (zema DOP vērtība). Terminu var lietot, runājot ne tikai par pozicionēšanas sistēmu, kurā izmanto pavadoņus, bet arī par citām lokalizācijas sistēmām, kurās izmanto citas ģeogrāfiski izvietotas stacijas.
Faktori, kas samazina precizitāti:
- pavadoņu orbītas;
- objekti – traucēkļi, kas aizsedz nepieciešamos debess apvidus.
Parametri
- HDOP (Horizontal) — precizitātes samazināšanās horizontālajā plaknē
- VDOP (Vertical) — precizitātes samazināšanās vertikālajā plaknē
- PDOP (Position) — atrašanās vietas precizitātes samazināšanās
- TDOP (Time) — laika precizitātes samazināšanās
Šie parametri ir attiecīgo kovariācijas matricu, kas sastāv no elementiem koordinātu globālajā vai lokālajā ģeodēziskajā sistēmā, funkcijas.
Parametrus var iegūt matemātiski, ņemot vērā pieejamo pavadoņu (navigācijas signāla avotu) izvietojumu. Daudzi GPS uztvērēji parāda visu pavadoņu esošo izvietojumu («pavadoņu zvaigznāju») ar DOP vērtībām.
Jāatzīmē, ka viss iepriekšminētais ir attiecināms ne tikai uz GPS sistēmām, bet arī, piemēram, uz elektroniskās pretdarbības sistēmām (angļu val. electronic warfare), kuras izmanto, lai noskaidrotu ienaidnieka raidītā starojuma avotu, piem., traucējumus radošo iekārtu vai vienkārši radiosignālu apmaiņas iekārtu, atrašanās vietu.
Interferometriskās metodes ieteicams izmantot sistēmās ar brīvības pakāpēm, kuras nav iespējams analizēt, jo signālu avotu izvietojums ir nepiemērots.